Selasa, 06 Desember 2011
Kamis, 10 November 2011
ELECTRO PNEUMATIK
ELECTRO PNEUMATIC
Seperti yang diketahui bahwa Fungsi PLC ini sebagai 'otak' dari seluruh sistem kerja dari suatu mesin.Tapi tentunya bahwa pergerakan mekanik suatu mesin proses produksi, digerakkan dengan suatu sistem pula, salah satunya adalah dengan menggunakan sistem pneumatik.
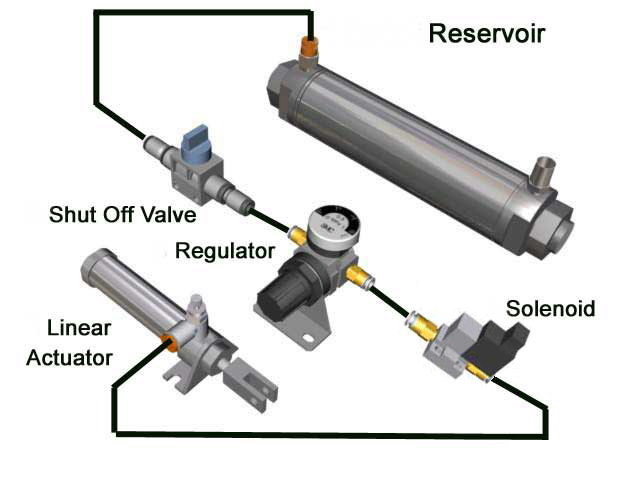
Sistem Pneumatik ini adalah suatu sistem yang menggunakan sumber angin untuk melakukan suatu proses pergerakan.
Pada pelatihan PLC-pneumatic ini, peserta pelatihan akan diberikan pelatihan bagaimana sebuah PLC digunakan untuk mengontrol sistem pneumatik. Kami mempunyai 8 peraga PLC - Pneumatic,

Materi yang diberikan pada pelatihan PLC-Pneumatic adalah sebagai berikut :
- Pemahaman Diagram rangkaian elektrik, diagram ladder dan diagram rangkaian pneumatik
- Registrasi Diagram rangkaian elektrik diubah menjadi diagram ladder
- Hubungan Diagram ladder dan diagram rangkaian pneumatik
- Mengidentifikasi dan peng-install-an software PLC ke komputer
- Diagram ladder dan regristrasinya diprogram dalam komputer mengacu pada tujuan operasi rangkaian pneumatik dan disimulasikan
- Pemahaman proses pen-download-an Program PLC dalam komputer
- Aplikasi macam-macam program PLC meliputi program Set-Reset, KEEP, DIFU, Timer, Counter, Interlock
- Pemasangan / perakitan I/O PLC ke dalam sirkuit elektro pneumatik,sensor,limit switch dan push button
- Pengoperasian sirkuit elektro pneumatik dengan PLC (programmable logic controllers )
SYARAF LISTRIK
Syaraf Listrik... Apa itu ?
Dengan Syaraf Listrik, pengguna dapat mencoba merangkai sistem kontrol diskrit / pensaklaran dengan memasang saklar input, berbagai macam timer dan pencacah/counter dan juga komponen speaker yg bisa menjalankan file format wav, untuk sebuah kebutuhan kontrol tanpa perlu memiliki skill dibidang programming (Assembly, C, C++, Delphi, Visual Basic, Java dll).
Sebagai tambahan, Syaraf Listrik juga memiliki kemampuan untuk melayani input / output luar melalui port paralel LPT ( 5 input dan 12 output ).
Untuk menyebarkan penggunaan freeware Syaraf Listrik versi 1.01, di akhir tahun 2004 telah dicetak sebuah buku + CD (yg berisi file-file freeware Syaraf Listrik, contoh rangkaian dan gambar-gambar aplikasi I/O) dengan judul : Sistem kontrol I/O dan kontrol suara pada PC tanpa Programming memakai Aplikasi freeware Syaraf Listrik.
PLC
KONSEP PROGRAMMABLE LOGIC CONTROLLERS (PLC)
Konsep dari PLC sesuai dengan namanya adsalah sebagai berikut :
Programmable : menunjukkan kemampuannya yang dapat dengan mudah diubah-ubah sesuai program yang dibuat dan kemampuannya dalam hal memori program yang telah dibuat.
Logic : menunjukkan kemampuannya dalam memproses input secara aritmetik (ALU), yaitu melakukjan operasi membandingkan, menjumlahkan, mengalikan, membagi, mengurangi dan negasi.
Controller : menunjukkan kemampuannya dalam mengontrol dan mengatur proses sehingga menghasilkan output yang diinginkan.
FUNGSI PROGRAMMABLE LOGIC CONTROLLERS (PLC)
Fungsi dan kegunaan dari PLC dapat dikatakan hampir tidak terbatas. Tapi dalam prakteknya dapat dibagi secara umum dan khusus.
Secara umum fungsi dari PLC adalah sebagai berikut :
- Kontrol Sekensial
PLC memroses input sinyal biner menjadi output yang digunakan untuk keperluan pemrosesan teknik secara berurutan (sekuensial), disini PLC menjaga agar semua step / langkah dalam proses sekuensial berlangsung dalam urutan yang tepat.
2. Monitoring Plant
PLC secara terus menerus memonitor suatu sistem (misalnya temperatur, tekanan, tingkat ketinggian) dan mengambil tindakan yang diperlukan sehubungan dengan proses yang dikontrol (misalnya nilai sudah melebihi batas) atau menampilkan pesan tersebut ke operator.
BAHASA PEMOGRAMAN
Terdapat banyak pilihan bahasa untuk membuat program dalam PLC. Masing-masing bahasa mempunyai keuntungan dan kerugian tergantung dari sudut pandang kita sebagai user / pemogram. Pada umumnya terdapat 2 bahasa pemograman sederhana dari PLC , yaitu pemograman diagram ladder dan bahasa instruction list. (mnemonic code).Diagram Ladder adalah bahasa yang dimiliki oleh setiap PLC.
LADDER DIAGRAM
Diagram Ladder menggambarkan program dalam bentuk grafik. Diagram ini dikembangkan dari kontak-kontak relay yang terstruktur yang menggambarkan aliran arus listrik. Dalam diagram ladder terdapat dua buah garis vertical dimana garis vertical sebelah kiri dihubungkan dengan sumber tegangan positip catu daya dan garis sebelah kanan dihubungkan dengan sumber tegangan negatip catu daya.
Program ladder ditulis menggunakan bentuk pictorial atau simbol yang secara umum mirip dengan rangkaian kontrol relay. Program ditampilkan pada layar dengan elemen-elemen seperti normally open contact, normally closed contact, timer, counter, sequencer dll ditampilkan seperti dalam bentuk pictorial.
Dibawah kondisi yang benar, listrik dapat mengalir dari rel sebelah kiri ke rel sebelah kanan, jalur rel seperti ini disebut sebagai ladder line (garis tangga). Peraturan secara umum di dalam menggambarkan program ladder diagram adalah :
q Daya mengalir dari rel kiri ke rel kanan
q Output koil tidak boleh dihubungkan secara langsung di rel sebelah kiri.
q Tidak ada kontak yang diletakkan disebelah kanan output coil
q Hanya diperbolehkan satu output koil pada ladder line.
Dengan diagram ladder, gambar diatas direpresantisak menjadi

Gambar 1. Diagram Ladder
Diantar dua garis ini dipasang kontak-kontak yang menggambarkan kontrol dari switch, sensor atau output. Satu baris dari diagram disebut dengan satu rung. Input menggunakan symbol [ ] (kontak normally open) dan [/] (kontak normally close). Output mempunyai symbol ( ) yang terletak paling kanan.
2. Prinsip-prinsip Ladder Diagram PLC
Untuk memperlihatkan hubungan antara satu rangkaian fisik dengan ladder diagram yang mempresentasikannya, lihatlah rangkaian motor listrik pada gambar dibawah ini.
Motor dihubungkan ke sumber daya melalui 3 saklar yang dirangkai secara seri ditambah saklar over load sebagai pengaman. Motor akan menyala bila seluruh saklar dalam kondisi menutup.

Gambar 2. rangkaian start – stop motor
Kesimpulan :
q Ladder diagram tersusun dari dua garis vertical yang mewakili rel daya
q Diantara garis vertikal tersebut disusun garis horizontal yang disebut rung (anak tangga) yang berfungsi untukmenempatkan komponen kontrol sistem.
3. Praktek memori Circuit (Latch)
Rangkaian yang bersifat mengingat kondisi sebelumnya seringkali dibutuhkan dalam kontrol logic. Pada rangkaian ini hasil keluaran dikunci (latching) dengan menggunakan kontak hasil keluaran itu sendiri, sehingga walaupun input sudah berubah, kondisi output tetap.

Gambar 3. Latching Circuit
TIMER
Timer berfungsi untuk mengaktifkan suatu keluaran dengan interval waktu yang dapat diatur. Pengaturan waktu dilakukan melaui nilai setting (preset value). Timer tersebut akan bekerja bila diberi input dan mendapat pulsa clock. Untuk pulsa clock sudah disediakan oleh pembuat PLC. Besarnya nilai pulsa clock pada setiap timer tergantung pada nomor timer yang digunakan. Saat input timer ON maka timer mulai mencacah pulsa dari 0 sampai preset value. Bila sudah mencapai preset value maka akan mengaktifkan Outputyang telah ditentukan.
COUNTER
Fungsi counter adalah mencacah pulsa yang masuk. Sepintas cara kerja counter dan timer mirip. Perbedaannya adalah timer mencacah pulsa internal sedangkan counter mencacah pulsa dari luar.
Selasa, 08 November 2011
Motor DC Driver
Dalam dunia mekatronika / Robotika, peran driver dc motor sangatlah penting untuk menjamin kehandalah dari sistem yang dibuat.
Motor driver tidak hanya mengatur pergerakan motor, akan tetapi juga diharapkan dapat mengatur kecepatan motor.
Ada beberapa driver motor yang ada saat ini, diantaranya adalah :
1. Motor driver satu arah putaran




 B. Rangkaian Full Adder
B. Rangkaian Full Adder
Rangkaian Full adder adalah sebagai berikut :

 2. Rangkaian Gerbang Logika Sekuensial
2. Rangkaian Gerbang Logika Sekuensial
 B. D Flip – Flop
B. D Flip – Flop
 C. Flip – Flop JK
C. Flip – Flop JK
 3. Register
3. Register


Dalam dunia mekatronika / Robotika, peran driver dc motor sangatlah penting untuk menjamin kehandalah dari sistem yang dibuat.
Motor driver tidak hanya mengatur pergerakan motor, akan tetapi juga diharapkan dapat mengatur kecepatan motor.
Ada beberapa driver motor yang ada saat ini, diantaranya adalah :
1. Motor driver satu arah putaran
Motor driver ini digunakan untuk mengatur pergerakan motor pada satu arah putaran saja (Tidak bisa bolak balik). Motor driver ini juga terdiri dari 2 macam, yaitu :
a. Driver Motor satu arah kecepatan tetap :
Driver Motor Satu Arah Kecepatan Tetap
Driver motor seperti gambar diatas digunakan untuk mengatur kerja dari motor yang tidak memerlukan pengaturan kecepatan, seperti motor pengangkat beban, atau pemindah beban.
2. Motor driver satu arah dengan pengaturan kecepatan Driver Motor Satu Arah Dengan Pengaturan Kecepatan
Jika diperlukan pengaturan kecepatan motor, maka kecepatan motor dapat di atur dengan memberikan pulsa PWM pada masukan Transistor FET, semakin tinggi duty cycle pada sinyal PWM, maka kecepatan motor akan menjadi semakin cepat, untuk PWM yang digunakan biasanya menggunakan frekwensi antara 100Hz – 200Hz.
Adapun rumus duty cycle adalah sebagai berikut :
Duty = [tHigh/(tHigh+tLow)] * 100 %
Untuk pengaturan motor dengan dua arah, prinsipnya menyerupai rangkaian di atas, dengan menggunakan konfigurasi H bridge.
Menggunakan Sistem Operasi Di Mikrokontroller
Sebuah sistem mikrokontroler / mikrokomputer hanya dapat melakukan satu proses instruksi di setiap siklus mesinnya (machine cycle), hal ini berarti sebuah mikrokontroler hanya dapat melakukan satu operasi saja pada suatu waktu.
Untuk dapat melakukan beberapa operasi sekaligus sebuah mikrokontroler memiliki fitur yang di disebut interupsi, interupsi inilah yang kemudian dapat membuat sebuah mikrokontroler seolah – olah dapat melakukan beberapa operasi sekaligus.
Ada beberapa sumber interupsi dalam mikrokontroler, seperti interupsi external, interupsi timer, interupsi reset (highest priority), ataupun interupsi ADC, dll.
Sebagai contoh, misalkan sebuah sistem yang dapat menampilkan keluaran di seven segmen, dan juga dapat membaca input dari keypad secara bersamaan, maka pengaturan output pada seven segmen ada di program utama, sedangkan input dari keypad ada dalam program interupsi timer, yang misalnya dilakukan setian 1 mS.
Untuk proses yang tidak terlalu banyak cara diatas masih dapat dilakukan dengan mudah, akan tetapi bagaimana jika suatu terebut harus dapat melakukan banya proses, seperti display di lcd, output di seven segmen, input keypad, input dari ADC, mengatur pwm, kontrol motor, dll, dalam waktu yang seolah – olah bersamaan, maka program yang dibuat akan menjadi lebih rumit.
Untuk mengatasi keadaan tersebut dapat dilakukan dengan menggunakan sistem operasi pada mikrokontroler, sistem operasi ini yang akan mengatur proses yang dijalanka. Sehingga mikrokontroler dapat memiliki fitur multasking yang sebenarnya.
 Operating System
Operating System

Ada banyak sistem operasi yang ada sekarang ini, diantaranya adalah DOS, WINDOWS, LINUX, MACOS, UNIX, dll. Salah satu sistem operasi yang dapat diaplikasikan di mikrokontroler 8bit seperti AVR ATMEGAXX adalah FREERTOS.
ELEKTRONIKA DIGITAL
Peralatan elektronika elektronika dewasa ini hampir semuanya sudah menerapkan prinsip – prinsip dari elektronika digital.
Di dalam elektronika digital hanya mengenal 2 keadaan logika, yaitu 0 dan 1, 0 berarti berarti tegangan (input/output) memiliki level tegangan tegangan antara 0 – 0,7 V (TTL), sedangkan 1 berarti tegangan (input/output) memiliki level tegangan antara 3,6 – 5 V.
Terdapat beberapa gerbang logika yang digunakan dalam dalam elektronika digital, dapat dilihat dalam tabel berikut ini:
Gerbang Logika Dasar
Dari tabel diatas, misal pada AND Gate pada masukan A berlogika 1, dan masukan B berlogika 1, maka keluaran F juga akan berlogika 1 seperti yang terlihat dalam tabel kebenaran.
Dalam Elektronika digital, rangkaian gerbang logika, rangkaian gerbang logika dapat dibagi menjadi 2 macam yaitu, rangkaian kombinasional dan rangkaian sekuensial :
1. Rangkaian Gerbang Logika KombinasionalRangkaian Gerbang logika Kombinasional dipakai dipakai pada rangkaian Adder, rangkaian adder ini banyak dipakai dalam aritmatika yang menjadi dasar dari ALU (Arithmatic and Logical unit) atau yang merupakan otak dari sistem mikro komputer.
A. Rangkaian Half Adder (2 bit)Ini adalah rangkain dasar dari rangkaian adder, rangkaiannya sebagai berikut :
Rangkaian Half Adder
Rangkaian diatas diatas adalah adalah rangkaian half adder 1 bit, rangkaian diatas berfungsi untuk menjumlahkan sebanya satu bit, misalnya pada masukan A berlogika 1 dan B berlogika 1, maka keluarannya adalah 10, CO (Carry out) bisa dipakai jika rangkaian ini akan dikembangkan menjadi lebih dari 2 bit.
Adapun tabel kebenarannya adalah sebagai berikut :
Tabel Kebenar Rangkaian Half Adder
Rangkaian Full adder adalah sebagai berikut :
Rangkaian Full Adder
Dalam rangkaian diatas, merupakan penyempurnaan dari Half adder, sehinnga pada rangkaian ini dapat dapat menyertakan Carry out dari dari penjumlahan sebelumnya, dengan adanya Carry in maka rangkaian diatas dapat dikembankan menjadi lebih dari 1 bit masukan, bisa 8bit, 16bit, dll.
Adapun Tabel kebenaran dari rangkaian Full Adder adalah sebagai berikut :
Tabel Kebenaran Rangkaian Full Adder
Rangkaian Gerbang Logika sekuensial adalah suatau rangkaian yang keluarannya dipengaruhi oleh logika masukan sebelumnya (Waktu sebelumnya).
Rangkaian Gerbang Logika Sekuensial adalah sebagai berikut :
A. Flip – Flop RS Flip - Flop RS
Flip - Flop D
Flip - flop JK
Register berfungsi untuk menyimpan data secara digital, register disebut juga sebagai memory dimanis. Dibangun dari kumpulan Flip – Flop yang banyaknya menentukan jumlah bit data yang dapat disimpan dalam Register.
Rangkaian Register adalah sebagai berikut :
A. Register SeriRegister seri adalah sebuah register dimana proses penyimpanan datanya dapat dilakukan secara serial.
Register Seri
B. Register Paralel
Register seri adalah sebuah register yang dapat menyimpan data dimana proses penyimpanan datanya dapat dilakukan secara paralel.
Register Paralel
Kamis, 03 November 2011
pneumatik
Pneumatik merupakan teori atau pengetahuan tentang udara yang bergerak, keadaan-keadaan keseimbangan udara dan syarat-syarat keseimbangan. Perkataan pneumatik berasal bahasa Yunani “ pneuma “ yang berarti “napas” atau “udara”. Jadi pneumatik berarti terisi udara atau digerakkan oleh udara mampat. Pneumatik merupakan cabang teori aliran atau mekanika fluida dan tidak hanya meliputi penelitian aliran-aliran udara melalui suatu sistem saluran, yang terdiri atas pipa-pipa, selang-selang, gawai dan sebagainya, tetapi juga aksi dan penggunaan udara mampat.
Pneumatik menggunakan hukum-hukum aeromekanika, yang menentukan keadaan keseimbangan gas dan uap (khususnya udara atmosfir) dengan adanya gaya-gaya luar (aerostatika) dan teori aliran (aerodinamika). Pneumatik dalam pelaksanaan teknik udara mampat dalam industri merupakan ilmu pengetahuan dari semua proses mekanik dimana udara memindahkan suatu gaya atau gerakan. Jadi pneumatik meliputi semua komponen mesin atau peralatan, dalam mana terjadi proses-proses pneumatik. Dalam bidang kejuruan teknik pneumatik dalam pengertian yang lebih sempit lagi adalah teknik udara mampat (udara bertekanan).
 Alasan Pemakaian Pneumatik
Alasan Pemakaian Pneumatik
Persaingan antara peralatan pneumatik dengan peralatan mekanik, hidrolik atau elektrik makin menjadi besar. Dalam penggunaannya sistem pneumatik diutamakan karena beberapa hal yaitu :
a. paling banyak dipertimbangkan untuk beberapa mekanisasi,
b. dapat bertahan lebih baik terhadap keadaan-keadaan tertentu
Sering kali suatu proses tertentu dengan cara pneumatik, berjalan lebih rapi (efisien) dibandingkan dengan cara lainnya
Pneumatik menggunakan hukum-hukum aeromekanika, yang menentukan keadaan keseimbangan gas dan uap (khususnya udara atmosfir) dengan adanya gaya-gaya luar (aerostatika) dan teori aliran (aerodinamika). Pneumatik dalam pelaksanaan teknik udara mampat dalam industri merupakan ilmu pengetahuan dari semua proses mekanik dimana udara memindahkan suatu gaya atau gerakan. Jadi pneumatik meliputi semua komponen mesin atau peralatan, dalam mana terjadi proses-proses pneumatik. Dalam bidang kejuruan teknik pneumatik dalam pengertian yang lebih sempit lagi adalah teknik udara mampat (udara bertekanan).
Alasan Pemakaian PneumatikPersaingan antara peralatan pneumatik dengan peralatan mekanik, hidrolik atau elektrik makin menjadi besar. Dalam penggunaannya sistem pneumatik diutamakan karena beberapa hal yaitu :
a. paling banyak dipertimbangkan untuk beberapa mekanisasi,
b. dapat bertahan lebih baik terhadap keadaan-keadaan tertentu
Sering kali suatu proses tertentu dengan cara pneumatik, berjalan lebih rapi (efisien) dibandingkan dengan cara lainnya
Langganan:
Komentar (Atom)